Ensuring Functional Safety in Vehicles
The adoption of ISO 26262 in 2011 was essentially an automobile-specific version of IEC 61508 to standardize the functional safety of automotive electronics. Safety risks are classified separately for each application according to the ISO 26262 standard. A distinction is made here between QM (no risk) and ASIL A through D (low to high risk). The software of each application is then certified separately according to the risk determined by independent agencies.
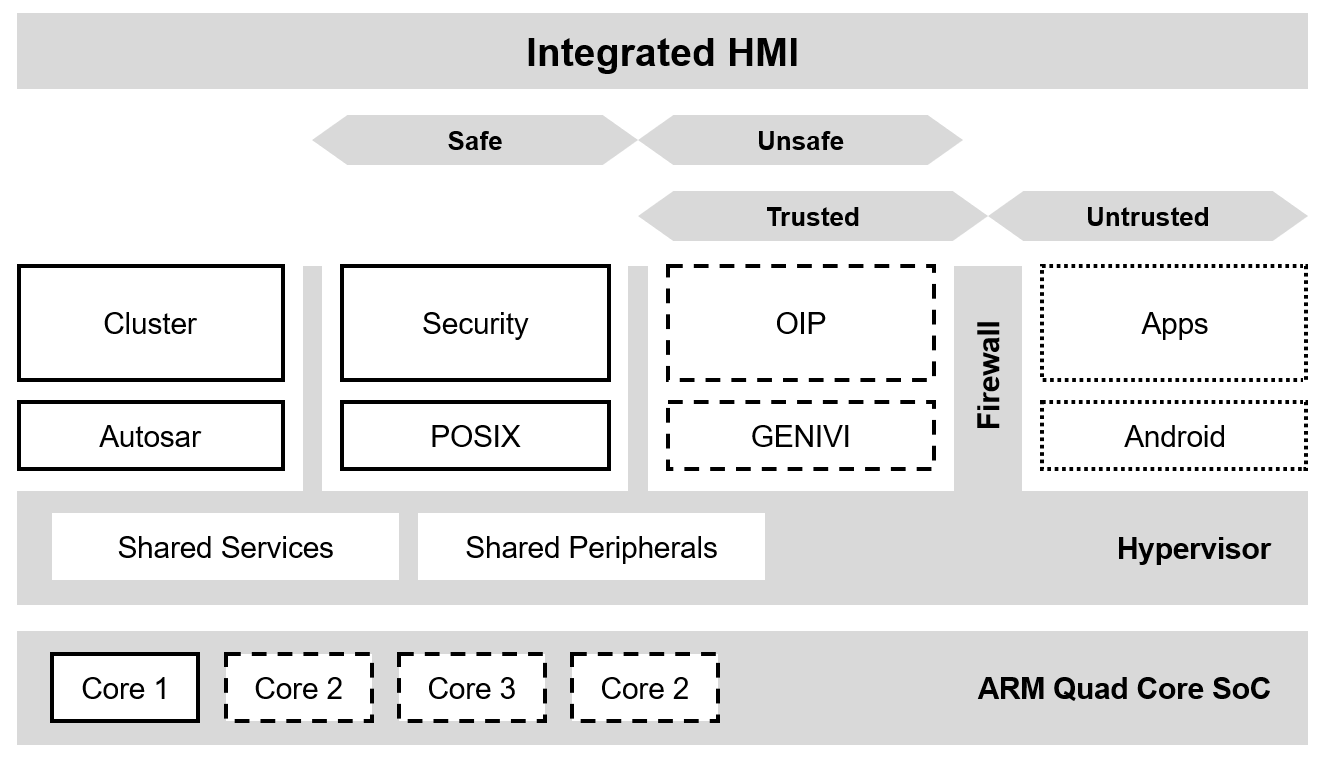
Because all Interior Domain Integration applications are placed in separate containers on one platform, it’s the job of the separation kernel in PikeOS to ensure that this separation actually works. The kernel’s task is to create an environment that, from the perspective of the individual application, does not differ from a physically separated system. Time and space partitioning ensures that each application is autonomous and does not “see” the other applications. It uses only the hardware resources explicitly assigned to it by the separation kernel. These include memory areas, resources and application sets at precisely specified times. The inter-partition communication controls the flow of information with other applications by way of fixed channels and limits communication to known and accepted instances.
The integrated platform from Continental can host multiple applications, which are classified according to functional safety levels: non-critical (unsafe) to highly critical (safe). The PikeOS separation kernel separates these from each other so that they do not see and interfere with one another. All applications are certified according to their individual criticality. PikeOS itself must comply with these safety criteria as well. The heterogeneous overall system therefore meets the functional safety requirements defined in ISO 26262. If, for example, a non-critical multimedia system running on Android causes an error and crashes, this will not interfere with a high-priority, critical assistance system. Instead, the critical assistance system continues running normally.
Overcoming Vulnerabilities via Security Rules
The more entertainment and infotainment electronics find their way into the vehicle, the more vulnerable the integrated platform is to malicious attacks and deliberate manipulation. For this reason, it is important to define IT security rules for applications in cars, and the underlying system software must support these rules.
For this purpose, the Multiple Independent Levels of Security (MILS) concept, which originated in military applications, has been around for a long time. MILS organizes systems into three horizontal levels with different rights and levels of trustworthiness.
The lowest level is formed by the hardware with other platform and security modules. Level 2 contains the separation kernel, which controls all communication in the system and allocates computation time and memory access to the various applications. Only the separation kernel has hardware access privileges (kernel mode) and is considered trustworthy in terms of security (trusted). All other modules of the system software on the second level are also considered trusted, but do not have hardware access privileges. This methodology helps configure, organize and monitor the functionality of the entire system. All applications are assigned to the third level, are considered not trustworthy (untrusted) and run in user mode.
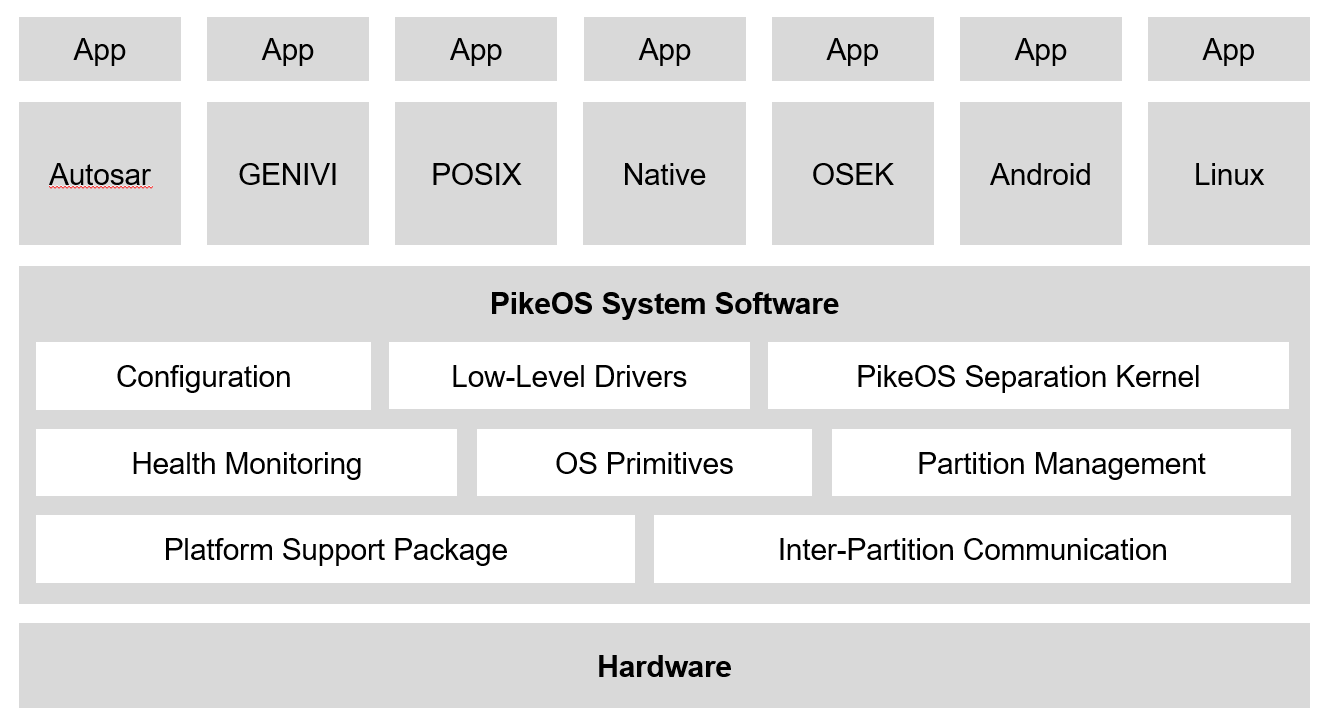
The PikeOS hypervisor supports a system architecture for Interior Domain Integration, allowing a combination of heterogeneous software applications in separate containers on a single platform. The separation kernel in PikeOS enables a strict separation of applications. It provides safety and security features that ensure the overall security of the automobile system and allows for the integration of automotive and consumer electronics and infotainment.
More information at www.sysgo.com/pikeos

 Twitter
Twitter LinkedIn
LinkedIn Facebook
Facebook Reddit
Reddit RSS
RSS Copy link
Copy link